WELCOME TO HEAD & NECK ROBOTIC SURGERY IN THE H&N
In 2004, Dr. Kai Xu contributed to pioneering research at Columbia University targeting robotic solutions for minimally invasive laryngeal surgery. This early work was among the first to tackle the challenges of robotic navigation in the narrow, delicate spaces of the upper aerodigestive tract, beyond the reach of conventional rigid-link robots (1).
A core challenge for flexible, snake-like surgical robots is actuation compensation (2): accurately controlling the tip’s position when the connecting actuation lines (cables or rods) flex, stretch, or experience friction. Such factors can introduce control errors, critical when submillimetric precision is demanded—especially in procedures like laryngeal or airway surgery. Over the years, advanced strategies have emerged: model-based and recursive estimation techniques, often supplemented by visual feedback or other sensor data, are now used to dynamically compensate for cable extension and force-induced deformation, significantly improving path tracking and overall robot performance (3).
How did this evolve? See de key milestones in Dr. Xu’s continuum robotics timeline:
The IREP robot consisted of two snake-like continuum arms, two parallelogram placement mechanisms, and a stereo vision module. The system fited through a 15 mm trocar and unfolded to perform single port access surgeries.
In 2016 Dr Kai Xu completed the tech transfer procedure so as to use Beijing Surgerii Robotics Co., Ltd to commercialize a newer generation of laparoscopic surgical robots.
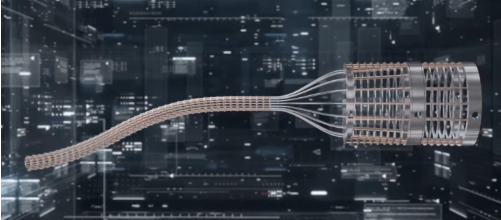
Conventional multi-link articulated instruments (like those seen in most legacy multi-port robotic systems) are inherently limited by their rigid “elbows” and wrists, which restrict their reach and agility in tortuous or confined environments. In contrast, continuum, snake-like robot arms—similar to what Medrobotics offered with the now-retired Flex system, and refined by Dr. Xu’s designs—are ultra-slender and able to adopt smooth, highly curved shapes. This allows entry into tight, angled, or curved surgical corridors such as the larynx, mediastinum, or deep pelvis—without requiring large access tracts or excessive tissue retraction (6).
Continuum arms, especially those using a dual-segment design:
In summary, the “dual continuum mechanism” developed by Dr. Kai Xu represents a breakthrough in robotic surgical instrumentation, enabling a leap from rigid, jointed systems to highly adaptable, compact, and dexterous “snake-like” robots. This design philosophy—born from laryngeal surgical needs—continues to drive innovations that expand what is surgically possible in the most challenging, confined, or delicate anatomical regions.
J Granell. September 15, 2025
References
(1) Xu K, Goldman RE, Ding J, Allen PK, Fowler DL, Simaan N. System Design of an Insertable Robotic Effector Platform for Single Port Access (SPA) Surgery. Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009): 5546–5552. doi:10.1109/IROS.2009.5354028
(2) Kai Xu and N. Simaan, Actuation compensation for flexible surgical snake-like robots with redundant remote actuation, Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006., Orlando, FL, 2006, pp. 4148-4154, doi: 10.1109/ROBOT.2006.1642340.
(3) Chen Y, Zhang C, Wu Z, Zhao J, Yang B, Huang J, Luo Q, Wang L, Xu K. The SHURUI System: A Modular Continuum Surgical Robotic Platform for Multiport, Hybrid-Port, and Single-Port Procedures. IEEE/ASME Transactions on Mechatronics. Accepted for publication in 2021. doi:10.1109/TMECH.2021.3085965
(4) Ding J, Goldman RE, Xu K, Allen PK, Fowler DL, Simaan N. Design and Coordination Kinematics of an Insertable Robotic Effectors Platform for Single-Port Access Surgery. IEEE ASME Trans Mechatron. 2013 Oct:1612-1624. doi: 10.1109/TMECH.2012.2209671
(5) Zhao J, Feng B, Zheng MH, Xu K. Surgical robots for SPL and NOTES: a review. Minim Invasive Ther Allied Technol. 2015 Feb;24(1):8-17. doi: 10.3109/13645706.2014.999687. Epub 2015 Jan 19. PMID: 25597629
(6) Dupont PE, Simaan N, Choset H, Rucker C. Continuum Robots for Medical Interventions. Proc IEEE Inst Electr Electron Eng. 2022 Jul;110(7):847-870. doi: 10.1109/JPROC.2022.3141338.
* Nitinol is a nickel-titanium alloy known for its shape memory and superelasticity, allowing it to return to a preset shape after deformation or accommodate large strains without permanent damage. It is biocompatible and widely used in medical devices such as stents, guidewires, and surgical tools for minimally invasive procedures, enabling compact delivery and expansion inside the body.